Premikanje po prostoru
Upravljanje računalnikov in druge elektronike s pritiski tipk in gumbov se v 21. stoletju zdi nekoliko zastarelo. Filmi nas že vrsto let prepričujejo, da bo v bližnji prihodnosti upravljanje bolj podobno naravni človeški interakciji. Pomembna smer v razvoju naravnega uporabniškega vmesnika je prepoznavanje kretenj, ki ga je domačemu uporabniku prvi res množično približal Microsoft s Kinectom, sledili pa so tako multinacionalke kot start-upi.
Tipkovnico so izumili pred računalniki, zato je logično, da so jo ti hitro posvojili. Sprva je bila vmesnik za luknjanje kartic, kasneje pa vmesnik za elektronski vnos podatkov in ukazov. Z vzponom grafičnih vmesnikov se je tipkovnici pridružila še miška. Čeprav je še precej drugih naprav za upravljanje – recimo za dotik občutljivi zasloni, grafične tablice, igralne palice – je vsem skupna uporaba istih čutil. Naprave se moramo dotakniti na določenem mestu, o siceršnjem dogajanju in premikanju pa nima pojma.

Kinect združuje več načinov zaznavanja 3D, zato ima več komponent: vir strukturirane svetlobe IR, kameri za vidno svetlobo in svetlobo IR, več mikrofonov in motor za sukanje naprave.
Razvijalci elektronike stremijo k čim enostavnejšemu upravljanju z njo. Uporabniški vmesnik z ukazno vrstico (CLI) se je že zdavnaj umaknil grafičnemu vmesniku (GUI), vztraja le še v specifičnih okoljih. Naslednji korak bo naravni uporabni vmesnik (NUI), kjer je končni cilj komunikacija z računalnikom, ki se ne bo razlikovala od medčloveške komunikacije. Da bi to lahko počeli, se morajo računalniki na ravni senzorjev najprej naučiti prepoznavati gibanje oziroma kretnje in glas, to pa mora seveda spremljati še razvoj računalniške pameti (umetne inteligence, AI), ki bo zajete podatke razumela in jih znala obdelati.
Prepoznavanje gibanja in kretenj nam je v dnevno sobo (dobesedno) prinesel Microsoftov Kinect, a to še zdaleč ni edini tak izdelek.
Kinectov laser ni nevaren
Ko beseda nanese na laserje, se ljudje zdrznejo in zamižijo. Vir svetlobe, ki jo oddaja Kinect, tehnično sodi med laserje, a ni nevaren. Deluje pri valovni dolžini 780 nanometrov, kar je tik za vidno rdečo svetlobo na bližnjem območju IR. Njegove svetlobe ne vidimo, zato bi lahko pogledali neposredno vanj, ne da bi to sploh vedeli. A ni razlogov za strah.
Kinectov laser sodi v prvi razred (Class 1), kar pomeni, da ima oddana svetloba moč manj kot 25 μW. Dejanski vir svetlobe sicer deluje z močjo 60 mW, a ta potuje skozi vrsto optičnih elementov, ki svetlobo razklopijo in zmanjšajo njeno intenziteto. Končnega uporabnika (deklarirano območje delovanja je na razdalji 0,7–6,0 metra) zadene nekaj mikrovatov, to pa je bistveno manj, kot na sončen dan prejmemo na odprtem.
Gibanje
Gibanje je mogoče zaznati na več načinov, zato tudi izdelovalci različnih naprav uporabljajo več tehnologij. Načeloma gre za dva ločena pristopa. Če imamo detektor na napravi, ki se giblje, je problem zelo enostaven in do danes izvrstno rešen. Najbolj razširjen primer so pametni telefoni z merilniki pospeška (akcelerometri), obratov (žiroskop) in zemeljskega magnetnega polja v vseh treh oseh.
Bistveno težji problem pa je zaznavanje gibanja drugih predmetov, pa čeprav človeški možgani to zlahka počnejo vse življenje. Pristopov je več, vsem pa je skupno, da merimo fizikalno veličino, ki se zaradi gibanja predmeta spreminja. Katerega bomo uporabili, je odvisno od namena. Samodejna luč mora ugotoviti le, da se nekaj dovolj velikega premika, krmilnik pa mora za igranje iger natančno poznati položaj telesa in premike ali zasuke posameznih delov. Pri komercialnih izdelkih za domačo rabo se zaradi cene in enostavnosti največkrat uporabljajo infrardeči in optični sistemi, načeloma pa bi lahko zaznavali tudi odboj zvoka (sonar), vibracije, magnetne lastnosti, temperaturni profil itd.

Kinect v okolico projicira IR vzorec pik, katerega deformacija na predmetih da informacijo o položaju v prostoru. Slika: Geospatial Modeling & Visualization, University of Arkansas.
Kinect
Razvoj Kinecta je Microsoft javno predstavil že junija 2009, tedaj še pod imenom Project Natal, kar po portugalsko pomeni božič in je tudi ime kraja v Braziliji. Oče projekta, Alex Kipman, je namreč Brazilec, čeprav ni iz Natala, temveč iz Curitibe. Končna imena vedno izberejo v marketingu in tako je poldrugo leto pozneje končni izdelek za konzolo Xbox 360 prispel na prodajne police pod imenom Kinect. Še poldrugo leto zatem je Kinect prispel tudi na Windows.
Delovanje Kinecta je dober zgled, katere sposobnosti mora imeti naprava za zajem globine in gibanja v prostoru ter njegovo tolmačenje. Izkaže se namreč, da je zajeto gibanje nujno tudi razložiti, zato Kinect uporablja dvostopenjski sistem. V prvi fazi Kinect prepozna oddaljenost predmetov v prostoru, v drugi fazi pa ugotovi, kaj je človeško telo in kje ter kako se premika.
Žiroskopi
Žiroskopi pa merijo spremembo orientacije glede na začetno orientacijo položaj, pri čemer jih ne zanima, kako ste v končni položaj prišli in kako daleč ste potovali premo. Včasih so jih imela le zemeljskega in vesoljska prevozna sredstva, danes pa so tudi v domači elektroniki. Spet uporabljamo žiroskope MEMS v čipih, ki jim je skupno izkoriščanje Coriolisovega učinka.
Kadar se naš opazovalni sistem vrti in je zato neinercialen (pospešen), opazimo odklanjanje premikajočih predmetov, ki ga lahko opišemo s sistemsko Coriolisovo silo (F = 2mv × ω). V resnici se sicer predmeti upirajo spremembi hitrosti vrtenja, a je fizikalna obravnava lažja, če se postavimo v vrteč sistem in dodamo sistemsko silo (ki je, mimogrede, razlog za vrtenje ciklonov v smeri urnega kazalca na severni polobli). Žiroskopi MEMS lahko delujejo na več načinov:
glasbene vilice (tuning fork) sta dve masi, ki nihata z enakima amplitudama v protifazi. Pri vrtenju sistema nastane nihanje v pravokotni smeri izven ravnine, ki ga izmerimo;
nihajoči disk (vibrating wheel) vzbujamo tako, da niha z lastno frekvenco okrog svoje simetrijske osi. Vrtenje sistema povzroči nagib, ki ga kot spremembo kapacitete zaznajo elektrode pod diskom, s čimer lahko merimo premike v dveh dimenzijah;
Foucaultovo nihalo (Foucault pendulum) so tako velikanske nihajoče uteži v muzejih in fakultetah za fiziko kot tudi majcene paličice v čipih, katerih nihanje je spet odvisno od vrtenja.
In kako pripravimo material do nihanja? Piezoelektrik deluje v obe smeri. Deformacija povzroči nastanek napetosti, pritisnjena napetost pa povzroči odklon. Izmenična napetost zato izzove – nihanje.
Zajem 3D informacije
3D informacijo lahko pridobimo na več načinov. Ti se delijo na take z dotikom merjenca in take brez dotika. V tej drugi skupini je moč podatke dobiti z odbojem svetlobe ali s presvetlitvijo. Kinect uporablja odboj svetlobe IR. Tehnologija se imenuje strukturirana svetloba in se danes široko uporablja za rekonstrukcijo 3D oblik iz 2D posnetkov, Microsoft pa je njeno implementacijo kupil od izraelskega podjetja PrimeSense, ki ga je kasneje prevzel Apple. Za uporabo potrebujemo vir svetlobe z znanim vzorcem (odtod ime tehnike), ki je lahko progast, pikčast ipd. Kinect uporablja pikčast vzorec, ki ga projicira v okolico. Ko vzorec pade na predmet, se v odvisnosti od oblike predmeta in vpadnega kota deformira, to zaznamo s kamerami. Če je vzorec primerno oblikovan, je mogoče iz deformacije vzorca na predmetu izračunati njegov položaj v prostoru. Natančnost se z zajemom slike iz več kotov še poveča. Kinectova kamera IR ima ločljivost 640 x 480 pik s frekvenco osveževanja 30 Hz in zaznavo 2048 sivin (rdečin?). V praksi ima kamera natančnost nekaj centimetrov. Njen zorni kot je 57° vodoravno in 43° navpično, dodatno pa motor skrbi za nagibanje Kinecta za 27°.
Poleg strukturirane svetlobe Kinect uporablja še dve tehniki, ki ju zmorejo tudi človeške oči. Prva se imenuje globina polja (depth from focus) in je dobro znana fotografom, saj označuje razdaljo, na kateri so predmeti pred točko izostritve in za njo še ostri. Preprosteje povedano, bolj oddaljeni predmeti so manj izostreni. Kinect je tehniko nadgradil z uporabo leče, ki ima različni goriščni razdalji v oseh x in y. Pravimo, da ima leča astigmatično razliko, kar je tudi ena izmed značilnih deformacij leče v človeškem očesu. Krog zato na Kinectovi leči dobi obliko elipse, katere orientacija je odvisna od razdalje.
Druga tehnika se imenuje stereo vid in uporablja paralakso, ki je najbolj znana astronomom. Če isti prizor opazujemo z dveh različnih gledišč, vidimo nekoliko drugačno razporeditev točk. Astronomske razdalje so velike, zato počakajo pol leta in opazujejo z nasprotnih točk na Zemljini orbiti okrog Sonca, razdalje v dnevni sobi pa so manjše, zato sta kameri le nekaj centimetrov vsaksebi. A v vseh primerih velja, da se položaj bližnjih predmetov na obeh posnetkih bolj razlikuje od položaja bolj oddaljenih, to pa spet omogoča izračun položaja v prostoru. Kinect podatke združi v zapis 3D informacije z imenom globinska slika (depth map), kjer vsaka točka na sliki nosi še informacijo o svoji oddaljenosti od leče.

Pri stereo vidu isti prizor hkrati posnamemo z dvema kamerama z znanima položajema. Razlike med slikama lahko preračunamo v razdaljo. Slika: Franjo Pernuš, Laboratorij za slikovne tehnologije, UL FE.
Tolmačenje 3D informacije
S pridobitvijo globinske slike je Kinect opravil šele polovico dela. Zdaj mora ugotoviti, kje na sliki je uporabnikovo telo in kako se premika, to pa se izvede v dveh korakih. Prvi korak predstavlja transformacija globinske slike v sliko telesa. Simulacija vseh možnih gibov človeškega telesa je neizvedljiva zaradi velika števila sklepov, ki delujejo kot vzvodi, podporišča in osi. Zaradi tega so se v Microsoftu lotili projekta zbiranja vseh mogočih gibov in poz, ki bi jih lahko zavzelo človeško telo med igranjem iger na konzoli Xbox. Poslali so svoje ekipe po vsem svetu in ljudi prosili, naj poplesujejo po prostoru, kakor da igrajo kakšno igro za Kinect. Vse zbrane podatke so obdelali in pridobili več stotisoč položajev različnih delov telesa.
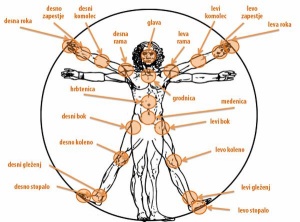
Kinectova programska oprema človeško telo razkosa na območja okoli večjih »sklepov«. Slika: Microsoft Robotics Blog
Ekipa je najprej poizkušala s prepoznavanjem celotnega telesa naenkrat, a so hitro ugotovili, da je možnih kombinacij daleč preveč. Zato so problem razkosali na obvladljivejše dele, tako da so telo razdelili na posamezne dele v okolici velikih sklepov. Zaznavanje položaja in orientacije posameznega dela telesa pa je izvedljivo. Kinect je potreboval na milijone primerov, da se je s strojnim učenjem naučil prepoznavanja, in danes mu to zelo dobro uspeva. Uporablja zelo uspešno metodo naključnega gozda (randomized decision forest), ki je ena izmed načinov razvrščanja. Gre za ansambelski algoritem, kjer gozd sestavljajo odločitvena drevesa. Kinect na začetku izbere 2000 naključnih vprašanj, nadaljnja vprašanja oziroma drevesa pa so odvisna od odgovorov na prejšnja.
Drugi korak pa je prevedba informacije o telesu oziroma njegovih delih v skelet. Človeka želimo namreč na koncu predstaviti kot povezano množico točk, ki ustrezajo glavnim sklepom v človeškem telesu. Tega težko storiti, ker iz fizikalnih razlogov težišče delov telesa, na katere figuro razkosa Kinect, sovpada s sklepi. Zato lahko uporabimo metodo srednjega premika (mean-shift algorithm). Za opisanimi koraki se skriva veliko matematike, ki pa za poljudno predočitev ni potrebna. Ob tem velja dodati, da Microsoft detajle delovanja Kinecta ljubosumno skriva, zato opis temelji na patentnih prijavah in znanstvenih člankih Microsoft Researcha.
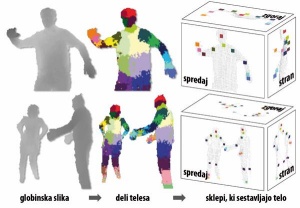
Globinsko sliko z informacijo o oddaljenosti Kinect najprej razkosa v dele človeškega telesa, potem pa v povezane točke, ki predstavljajo sklepe. Slika: Jamie Shotton, Microsoft Research Cambridge.
PlayStation Move in Wii Remote Plus
Kinect je še pred uradnim izidom dobil konkurenco, kar je najlepši znak, da je tehnologija zadetek v polno. Sony je predstavil krmilnik PlayStation Move, Nintendo pa svoj Wii Remote Plus. Način delovanja je enak, sámo delo z napravama pa popolnoma drugačno.
Kinect trdno stoji na polici in pred njim prosto poplesujemo, PlayStation Move pa je ergonomsko oblikovana palica, ki je še najbolj podobna mikrofonu, na vrhu pa ima posebno obarvano kroglo. Move primemo v roko in mahamo naokoli, naprava pa sama ugotovi, kako mahamo in kod. Uporablja tehnologijo za zaznavanje lastnega premikanja (trije žiroskopi in merilniki pospeškov ter merilnik gravitacijskega polja), a si pomaga z nekaj podobnimi zvijačami kakor Kinect.
Krmilniku namreč pomaga kamera PlayStation Eye, ki je v resnici preprosta kamera USB, ki snema 640 x 480 pik s frekvenco 60 Hz. Ker so mere in barva krogle natančno znane, lahko iz posnetka kamere precej dobro izračunamo položaj krogle in s tem tudi krmilnika. V pomoč pa so seveda lokalni senzorji.
Nintendo Wii Remote pa je že precej stara naprava, ki je na voljo že osem let. Tudi Wii Remote primemo v roko in mahamo z njim, merilniki pospeška pa zaznajo premikanje v vseh treh oseh. Za delovanje potrebuje še Sensor Bar, ki uporablja podobno zamisel kot Kinect; na dveh koncih ima po pet diod IR, oddano svetlobo pa lovi Wii Remote. Logika je torej ista, izvedba pa obrnjena. Krmilnik Wii Remote lovi svetlobo, ki jo odda Sensor Bar, in tako izračuna svoj položaj, Kinect pa lovi odbito svetlobo s predmetov v prostoru, ki jo odda sam. Wii Remote Plus je leta 2010 prinesel še žiroskope, s čimer je postal pravi konkurent PlayStation Movu.


Laserske tipkovnice IR so na lisasti ali neravni podlagi neuporabne. Na fotografiji že precej star Cellulon LaserKey CL850 na lesu (zgoraj) in granitu (spodaj). Slika: variableghz.com.
Prostorski zvok
Kinect ima tudi mikrofon, da ga lahko upravljamo glasovno. Tej nalogi običajen mikrofon iz spletne kamere ne bi bil kos, ker je Kinect v dnevni sobi običajno postavljen bliže zvočnikom kakor igralcu. Medtem ko bi klasičen mikrofon želel zajeti bližnje zvoke in utišati ozadje, mora Kinect storiti ravno nasprotno, oziroma zajeti celoten ambientalni zvok.
Zato potrebujemo več mikrofonov, ki so razporejeni po vsej napravi. Kinect ima štiri v ravni liniji, tri na levi in še tri na desni strani naprave. Kinect se v bistvu vede kot naš sluh, saj imamo dvoje ušes prav zato, da približno razločimo razdaljo in smer do vira zvoka. S primerjavo zajetih zvokov na vseh desetih mikrofonih in zapleteno matematiko Kinect približno določi, od kod prihaja posamezen zvok. Ker Kinect s svojimi senzorji IR ugotovi tudi, kje stoji človek, lahko precej dobro določi, ali neki zvok proizvaja uporabnik. Filtri potem porežejo frekvence onkraj razpona človeškega glasu (80–1100 Hz) in odstranijo odboje ter odmeve, da je signal primeren za prepoznavanje govora.
Asusov in HPjev neuspeli poizkus
Doba zaznavanja gibanja se je za igranje iger in krmiljenje računalnikov s prelomom desetletja šele dobro začela, že tedaj pa smo imeli na smetišču zgodovine nekaj izdelkov. Asus je svoj Eee Stick pokazal že leta 2008, potem pa so ga dve leti pozneje potiho upokojili. Igralna palica z merilniki pospeška za igranje iger na Asusovi platformi Eee kupcev ni prepričala.
Še slabše se je odrezal Hewlett-Packardov poizkus z imenom Swing, ki so ga oglaševali kot prvi krmilnik za zaznavanje gibanja za PCje, pa potem nikoli ni zares prišel v prodajo. Naprava v obliki televizijskega daljinca z merilniki pospeška se je še najbolje prodajala v Indiji, danes pa je sploh ni več mogoče kupiti. HP se je zato modro odločil, da se tega posla ne bo šel, zato je lani v svoj prenosnik Envy 17 vgradil kar preizkušeni LeapMotion (glej v nadaljevanju).
Navidezne tipkovnice
Že precej primitivnejše zaznavanje gibanja pa zadostuje za uporabo navideznih tipkovnic. Z rdečo (to pot vidno) svetlobo na poljubno površino projiciramo shemo tipkovnice, kamera pa potem zaznava gibanje prstov po tej površini in to interpretira kakor pritiske tipk. Patent za to je IBM v Evropi dobil že leta 1993 in čeprav smo v dvajsetih letih videli nekaj izdelkov, se zamisel ni prav dobro prijela. Razlogov je več, najpomembnejša pa sta dva. Tipkanje po navidezni tipkovnici se ne more primerjati s klasično, ker nimamo povratne informacije o pritisku tipk, zato je počasnejše in bolj nagnjeno k napakam. Te tipkovnice bi bile uporabne tam, kjer so razlogi prostorske oziroma drugačne omejitve, a jih je poceni tehnologija za dotik občutljivih zaslonov izpodrinila tudi tu.
Za delovanje navidezne tipkovnice ni dovolj le projicirana shema tipkovnice na površini, saj mora nekako zaznati gibanje prstov. Zato tik nad njo v infrardeči svetlobi izriše ravnino, ki jo s pritiski na navidezne tipke prekinjamo. Vgrajena kamera zazna prekinitve in jih prevede v vhodni signal kakor klasična tipkovnica.

PlayStation Move in Wii Remote Plus med igranjem držimo v roko in z njima besno mahamo naokoli, kar zaznava armada vgrajenih tipal. PlayStation Move si pomaga s kamero Eye, Wii Remote plus pa lovi svetlobo, ki jo oddaja Wii Sensor Bar.
Pospeškometri
Včasih so bili merilniki pospeška rezervirani za raketoplane, danes pa jih verjetno nosite ker na sebi. Ne le tistih v ušesu, temveč na pametnih telefonih (zato se slika zasuče, ko obrnete telefon), tablicah in prenosnih računalnikih, v vsakdanjem življenju pa jih najdete tudi v avtomobilskih zračnih blazinah, boljših pralnih strojih, na letalih, ladjah itd.
Pospeškometri v resnici ne merijo pospeška, temveč silo, ki deluje nanje. Že Newton je ugotovil, da gre za dve plati istega kovanca (F = ma), zato je rezultat enak. Pospeškometrov je več vrst, mi pa si oglejmo digitalne (mikroelektromehanski sistemi, MEMS), ki so vgrajeni v obliki čipa in jih najdemo v pametnih telefonih, PlayStation Move, Nintendo Wii Remote itn. Največkrat gre za piezoelektrične s širšim območjem delovanja ali pa za kapacitivne z večjo natančnostjo.
Kapacitivni pospeškometri – takega ima na primer iPhone – imajo v notranjosti kondenzator, ki ga sestavljata elektrodi, ter vmes eno utež. Pospešek povzroči spremembo razdalje med elektrodama in utežjo (govorimo o mikrometrih), zaradi česar se kapaciteta kondenzatorja spremeni. Seveda je kondenzatorjev več in so različno orientirani, da lahko natančno merimo pospeške v vseh dimenzijah. Piezoelektrični pospeškometri pa izkoriščajo piezoelektrični učinek nekaterih materialov, ki kristalizirajo v asimetrični rešetki. Ti se na mehansko napetost odzovejo z nastankom električne napetosti, ki jo lahko merimo. V piezoelektričnem pospeškometru je piezoelektrični material in utež, ki pritisne nanj in povzroči nastanek napetosti, ki jo merimo.
LeapMotion
Priznajmo si, da sta tipkovnica in miška zelo uporaben, razširjen in tudi udoben način dela z računalniki, a gre v bistvu za ostanka 20. stoletja. Kdor je gledal Posebno poročilo (Minority Report), si je verjetno živo zapomnil rokavice, s katerimi je Tom Cruise brez dotikov z mahanjem pred velikimi steklenimi zasloni upravljal računalnik. Mlado podjetje LeapMotion je lani izdalo istoimensko napravo, ki obljublja prav to, le brez uporabe rokavic.
Gre torej za pomanjšano različico Kinecta, kjer nas zanima le gibanje rok od dlani navzdol. Po eni strani je to precej lažje obvladljiv problem, a po drugi strani fina motorika terja zaznavanje z višjo ločljivostjo, da ujamemo tudi najmanjše gibe. LeapMotion se pohvali z dvestokrat natančnejšim zaznavanjem kakor Kinect, čeprav v praksi kljub temu ne deluje vedno brez zatikanja. O njem smo že pisali lani (Monitor 09/13: S prsti po zraku), do danes pa smo dobili drugo različico programske opreme, za zdaj še v beta fazi, ki je po prvih preizkusih manj hroščata in požrešna – res pa so tudi računalniki v tem času napredovali.
LeapMotion ima dve kameri s širokokotnimi lečami za zaznavanje svetlobe z valovno dolžino 850 nanometrov (bližnji IR) in tri diode, ki oddajajo to svetlobo. To zadostuje za pokrivanje polkrožnega območja na razdalji do enega metra, frekvenca zajema slike pa je 300 Hz. LeapMotion ne izdela globinske slike kakor Kinect, temveč na surovih podatkih iz senzorjev izvede matematične operacije, iz katerih izlušči 3D podobo okolja v vidnem polju naprave. Pravzaprav to opravilo naloži kar centralnemu procesorju, zato je LeapMotion na slabših računalnikih domala neuporaben. Dobljene podatke dopolni tako, da doda manjkajočo informacijo (če, recimo, palec zakriva del kazalca in podobno). Kakor pri vseh napravah šele potem prek ustreznih knjižnic aplikacija dobi vhodno krmilno informacijo.
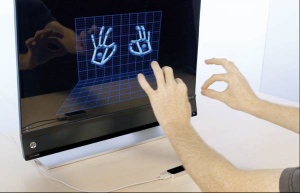
LeapMotion v velikosti večje škatlice za vžigalice se priključi prek USB in postavi na mizo, kjer zaznava gibe in položaj rok.
Touch+
Letos avgusta se je na prizorišče upravljanja brez dotikanja izstrelilo podjetje Ractiv, ki je na Kickstarterju sfinanciralo Touch+. Medtem ko LeapMotion še pestijo porodne težave in omogoča le upravljanje s kriljenjem po zraku, lahko Touch+ v na dotik občutljivo ploskev katerokoli površino.
O tehnologiji, ki je Touchu+ vdahnila življenje, je Ractiv skrivnosten. Znano je, da majhna ploščica, ki jo pripnemo nad zaslon ali postavimo ob računalnik, vsebuje dve kameri, ki snemata okolico. Za razliko od drugih podobnih sistemov kameri opazujeta svet v vidni svetlobi, tako da viri IRja niso moteči. Vsa čarovnija se zgodi v programski opremi, ki iz slike, ki jo posredujeta kameri, izlušči dogajanje. Načeloma gre za stereo vid, saj kameri vidita dogajanja zaradi različnega gledišča drugače.
Kompasi
Zakaj pa bi za zaznavanje gibanja potrebovali kompas? Ni tako neumno, kot se sprva sliši. Če ne stojite ravno pod daljnovodom iz Krškega, lahko merite zemeljsko magnetno polje, ki je v krajših časovnih intervalih sorazmerno konstantno. Ko napravo vrtite, jo silnice magnetnega polja prebadajo pod različnim kotom, to pa lahko natančen kompas zazna. Njegova natančnost pri majhnih premikih je večja od pospeškometrov in žiroskopov.
Čeprav je klasični kompas magnetna igla, magnetometri MEMS niso magnetni. To je logično, saj močna magnetna polja v bližini občutljive elektronike niso zaželena, v pametnih telefonih pa bi dejansko motila sprejem. Magnetometri ne merijo le Hallovega učinka (nastanek napetosti v vodniku, skozi katerega pravokotno na magnetno polje teče električni tok), ki se ga morebiti spomnite s šolskih ur fizike. Nekateri merijo upornost anizotropnih magnetorezistentnih materialov, ki se jim upornost spreminja v odvisnosti od zunanjega magnetnega polja in njegove smeri. Večina magnetometrov MEMS pa tako ali drugače meri Lorentzovo silo, ki nastopi, ko nabiti delec potuje skozi električno in magnetno polje. To silo pa določimo tako, da merimo njene posledice z uporabo piezoelektričnih materialov, optičnim merjenjem premikov komponent ali opazovanjem njihove lastne frekvence nihanja.

Ractiv Touch+ se pripne nad monitor ali postavi na mizo, potem pa z dvema kamerama opazuje okolico, tako da lahko pišemo in rišemo po poljubni površini.
Namesto konca
To, kar smo videli, je pravzaprav šele začetek. Strojna oprema za zaznavanje premikanja po prostoru trenutno nekoliko prehiteva programsko, a s povečevanjem računske moči in izpopolnjevanjem algoritmov bosta upravljanje računalnika brez fizičnega dotikanja ter igranje iger brez fizičnih vmesnikov med nami, kot bi mignil. Tehnologija ni uporabna le za zabavo, temveč tudi za resne namene, kot je na primer krmiljenje računalniških pripomočkov v operacijskih sobah, kar smo videli že pred tremi leti. Tam upravljanje brez dotikanja umazanih tipkovnic in zaslonov prihrani veliko časa pri sterilizaciji.
Omejitve ne bodo tehnološke, temveč predvsem družbene in ergonomske. Koliko vas kriljenje bo zraku utrudi in kako je to sprejemljivo na predstavitvi poslovne zamisli izvršnemu direktorju, namreč ni odvisno od nobene tehnologije.