43-gramski helikopterski dron s kamero
Droni z vgrajeno kamero niso prav poceni. Je res, da lahko tudi 43-gramski daljinsko voden helikopterski dron opremimo z Wi-Fi kamero? Kako deluje? Koliko stane?
Božično-novoletni prazniki so prinesli v naš dom novo zabavo, daljinsko voden model helikopterja, zato si nisem mogel kaj, da ne bi razmišljal o nadgradnji s kamero, saj priloženi izvijač ne omogoča le menjave poškodovanih lopatic v nasprotni smeri vrtečih se rotorjev (dve rezervni sta priloženi), temveč tudi razdiranje ostalih delov. Proizvajalec igrače ni uporabil lepila, zato lahko dokaj preprosto razstavimo skoraj vse, razen natisnjenih delov, kot so zobniki, osi rotorjev in nosilci lopatic.

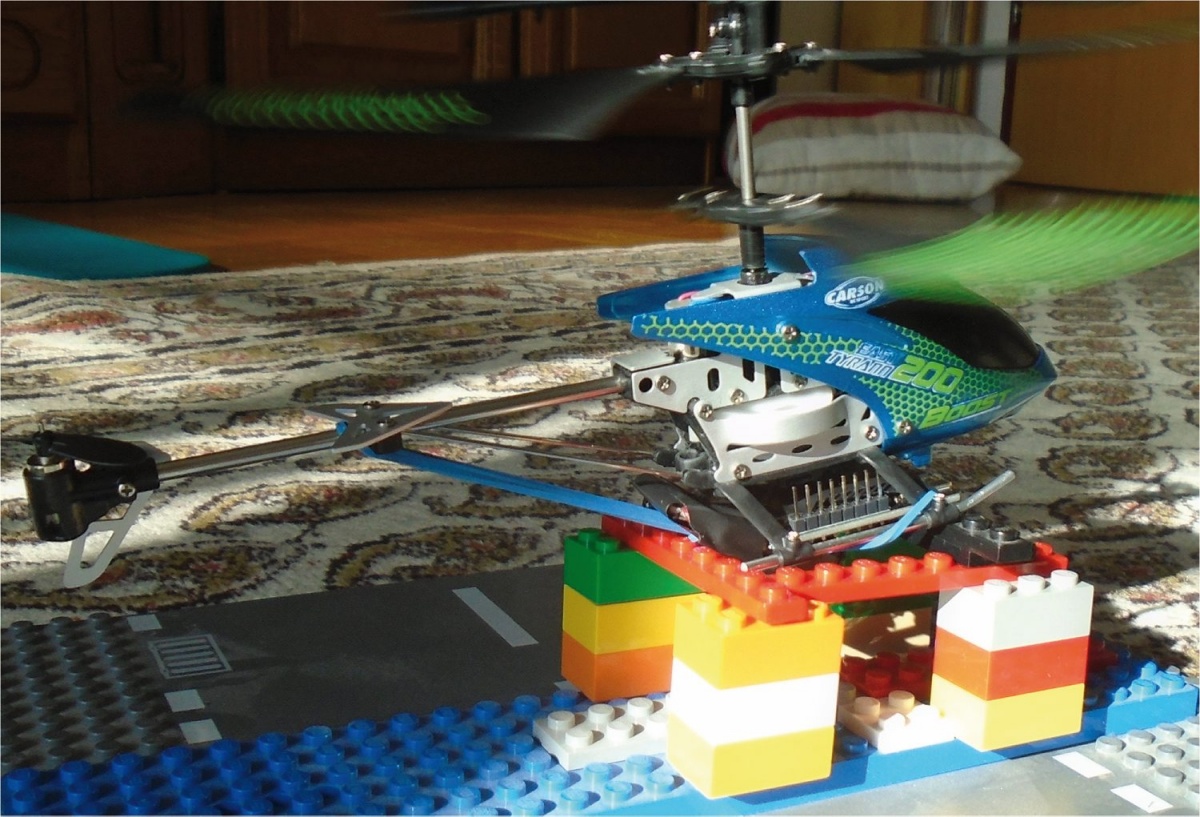
Polet helikopterja Carson Easy Tyrann 200, opremljenega s kamero
Od ideje …
Enostavni droni, ki jih lahko v slovenskih trgovinah kupimo za 20–50 evrov, lahko pri polni bateriji poletijo z dodatno obtežitvijo približno tretjine svoje mase, kar je pri 43-gramskem okoli 15 gramov. Nanje zato ne moremo preprosto pritrditi majhnega digitalnega fotoaparata, si pa lahko pomagamo s priljubljenim razvojnimi modulom ESP32-CAM, ki ga lahko naročimo v vseh svetovnih spletnih trgovinah z mikroelektroniko (npr. Farnell, Digi-Key, Aladin, Muser ... ) pa tudi pri Amazonu.
Sestavljata ga komunikacijsko-procesorski ??? z možnostjo komunikacije prek Wi-Fija in miniaturna kamera s priključkom SCCM z ločljivostjo 2 MP (milijona pik), vgradimo pa lahko tudi druge združljive kamere z ločljivostmi do 5 MP. Modul ESP32-CAM tehta vsega 11 gramov, zato ga majhen dron z lahkoto ponese v zrak, a zagotoviti mu moramo še električno napajanje ...
O helikopterskem dronu
Klasični droni pravokotne oblike imajo navadno po štiri rotorje in dokaj zapleten krmilnik z elektronskim giroskopom, ki je nujen za stabilnost v zraku, medtem ko helikopterju s tremi rotorji in z mehanskim giroskopskim stabilizatorjem zadošča že enostaven krmilnik, podoben tistim v nekoliko zmogljivejših daljinsko vodenih modelih avtomobilov in čolnov. Vir energije je sorazmerno lahka litijeva polnilna baterija.
Dron krmilimo z infrardečim svetlobnim signalom (izvedba IR) ali radijskim signalom (izvedba RC). Izvedbe IR so uporabnejše v zaprtih prostorih, saj jih ne motijo radijski signali omrežij UMTS, GPRS, Wi-Fi, bluetooth in drugih, medtem ko so izvedbe RC uporabnejše na prostem, saj niso občutljive na močno sončno svetlobo. Kljub temu pa izvedba drona nima bistvenega vpliva na njegovo maso.
Upravljanja drona se moramo naučiti postopno, predvsem pa so v zaprtih prostorih močno omejeni z višino stropa in moramo previdno uravnavati hitrost glavnih rotorjev, da se ne zaletijo v predmete na prostoru, strop, tla ali stene.
Če dron dodatno obtežimo s kamero, zmanjšamo njegovo odzivnost na premike krmilne palice, kar je pri polnih baterijah v majhnih zaprtih prostorih včasih celo dobro, saj ga lažje vodimo na konstantni višini. Z večjo maso tudi bolje kljubuje mini turbulencam, ki nastanejo zaradi gibanja in odboja zraka od predmetov in sten prostora. Zanimivo je opazovati tudi letenje helikopterja tik ob tleh, kjer zaznamo t. i. talni učinek (angl. ground effect), ki omogoča lebdenje tudi s skoraj izpraznjeno baterijo.
Napajati kamero iz lastne baterije ali iz drona?
Modul ESP32-CAM potrebuje za svoje delovanje vsaj okoli 3 V napetosti. Če bi mu dodali ploščato litijevo baterijo tipa 2032 za enkratno uporabo, bi obtežitev helikopterja povečali še za 5 gramov oziroma skupaj na dodatnih 16 gramov, kar bi bilo na meji njegovih letalnih sposobnosti. Tako je skoraj edina možnost napajanje kamere kar iz glavne polnilne baterije helikopterja, a tu brez razdiranja ohišja ne gre.
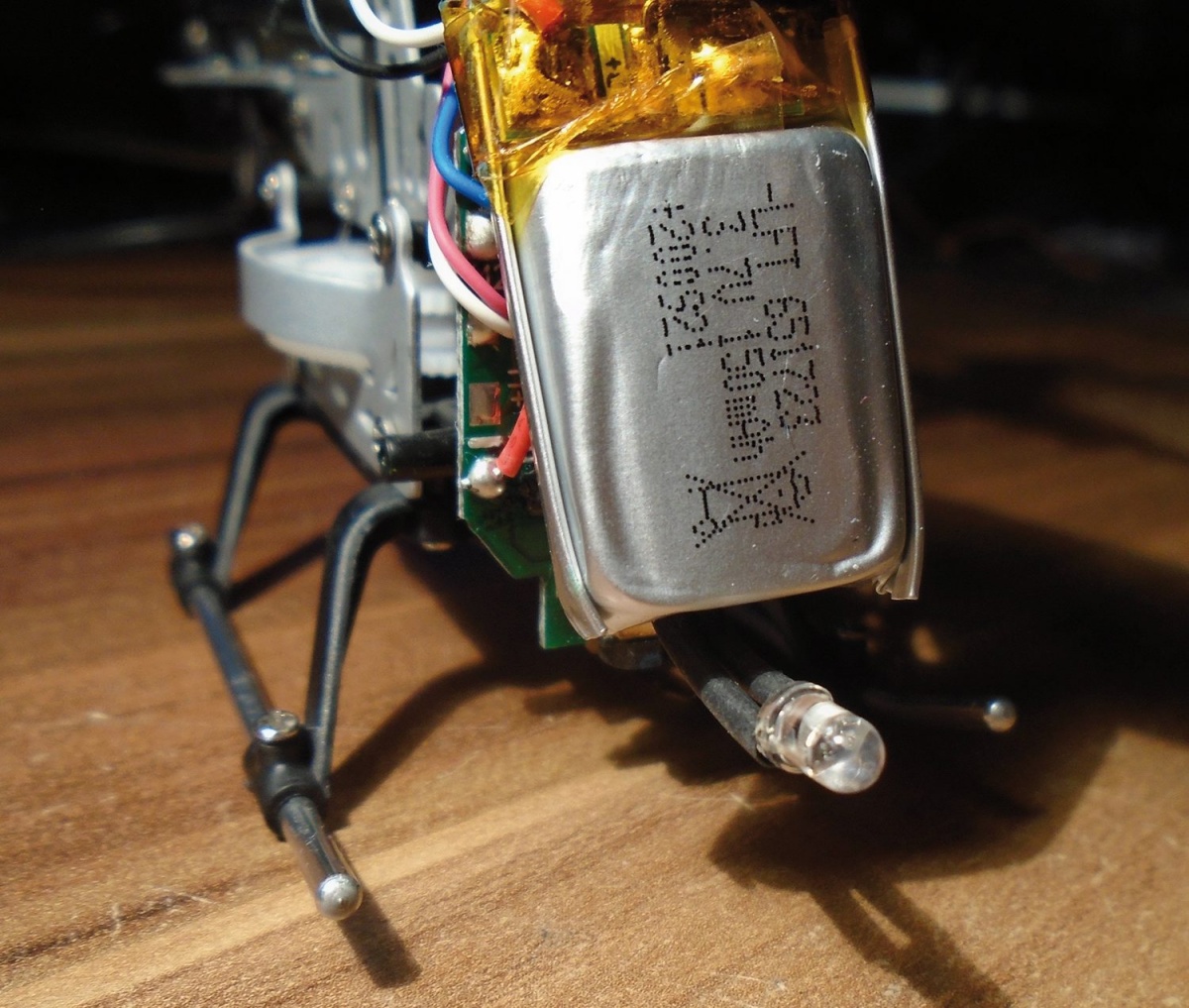
Ko odstranimo kabino, opazimo 3,7-voltno baterijo s 150 mAh, s katero lahko helikopter brez kamere leti okoli osem minut.
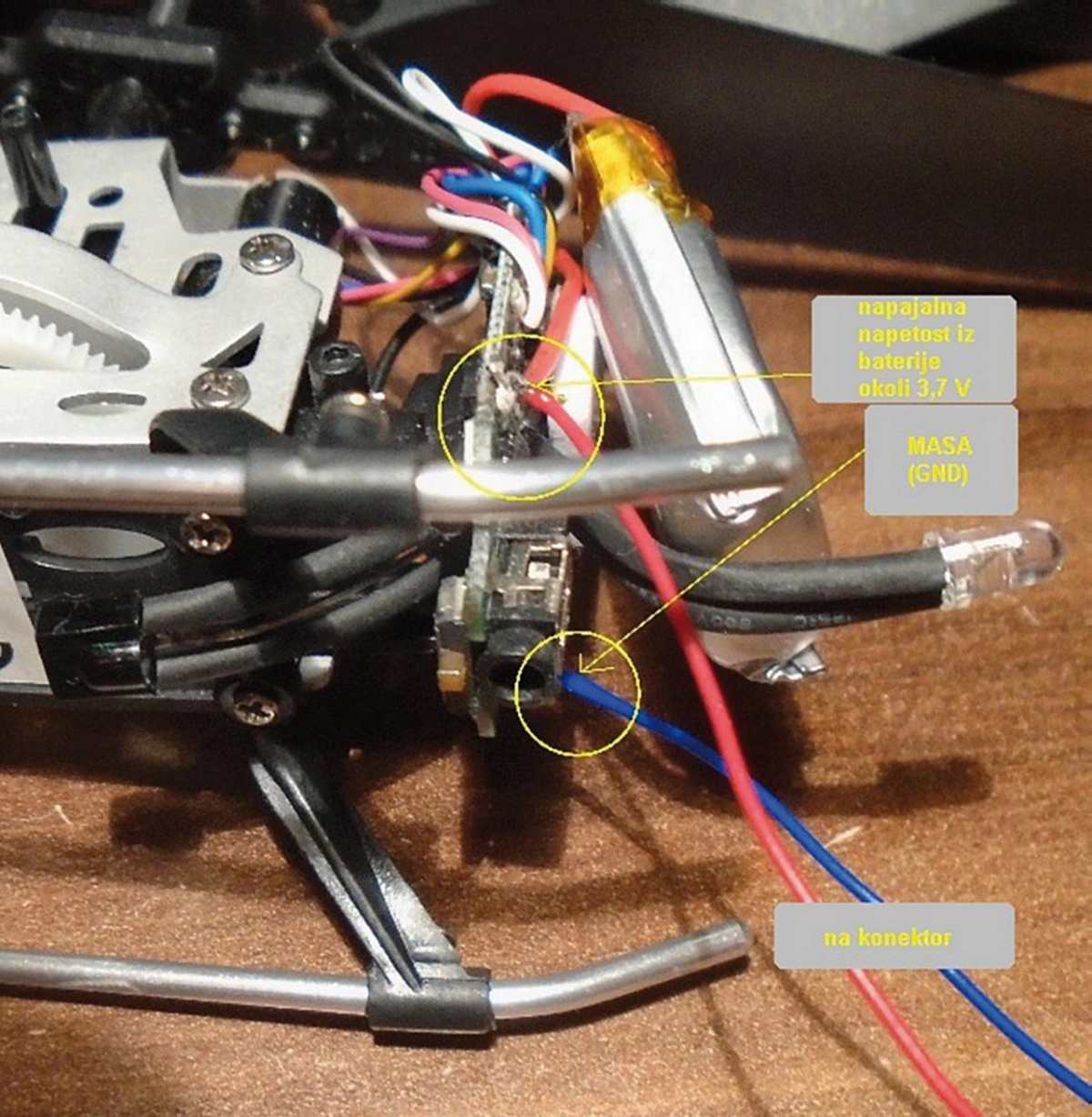
Kabina helikopterja je privita s štirimi vijaki, ki so prav taki kot tisti, s katerimi so pritrjene lopatice rotorjev, zato je ni težko odstraniti. Podnjo uzremo hitro polnilno 3,7-voltno litijevo baterijo z vsega 150 mAh, ki helikopterju brez kamere zagotavlja energijo za okoli osem minut letenja. Baterija je na krmilni modul helikopterja (prek katerega jo tudi polnimo iz vtičnice USB) prispajkana z rdečim kablom (+) in s črnim (–). Več kot očitno je zato, da bi lahko vzporedno na napajanje povezali tudi modul s kamero.
Kako pravilno razstaviti dron in ga ponovno sestaviti?
Če igračo razdremo v naglici, ne da bi vsak korak razstavljanja dokumentirali (dobro si je pomagati z digitalnim fotoaparatom), ni izključeno, da ne bomo pri sestavljanju česa pozabili, še posebej, če se bomo tudi tega lotili v naglici. Pri sestavljanju moramo še posebej previdno in natančno priviti vijake. Če se (majhen) kovinski vijak napačno usede v navoj v plastičnem nosilcu, ga med privijanjem poškoduje, zaradi česar lahko nosilec poči ali pa vijak že pri naslednjem privijanju ne bo več držal.
Izdelava in montaža napajalne vtičnice
Za napajanje kamere modelu drona dodamo napajalno vtičnico (tehta manj kot gram), ki jo povežemo z baterijo helikopterja in s sekundnim lepilom prilepimo na spodnji del njegovega ohišja s sankami. S tem helikopter ohrani svoje prvotne letalne sposobnosti, ko kamere ne potrebujemo.
Prispajkana kabla povežemo na vtičnico.
Za osnovo uporabimo enovrstični vtični konektor z nekaj deset kontakti, od katerega odrežemo vtičnici s po dvema kontaktoma. Iz prve kontakta izpulimo s kleščami in jo uporabimo kot distančnik, ki ga nalepimo neposredno na spodnji del ohišja s sankami. Nanj prilepimo vtičnico z dvema kontaktoma, kamor prispajkamo žici za napajanje, ki ju povežemo vzporedno na napajalna kontakta helikopterjevega krmilnika. Obenem z oznakama »+« in »–« označimo tudi polariteto na napajalnem priključku.
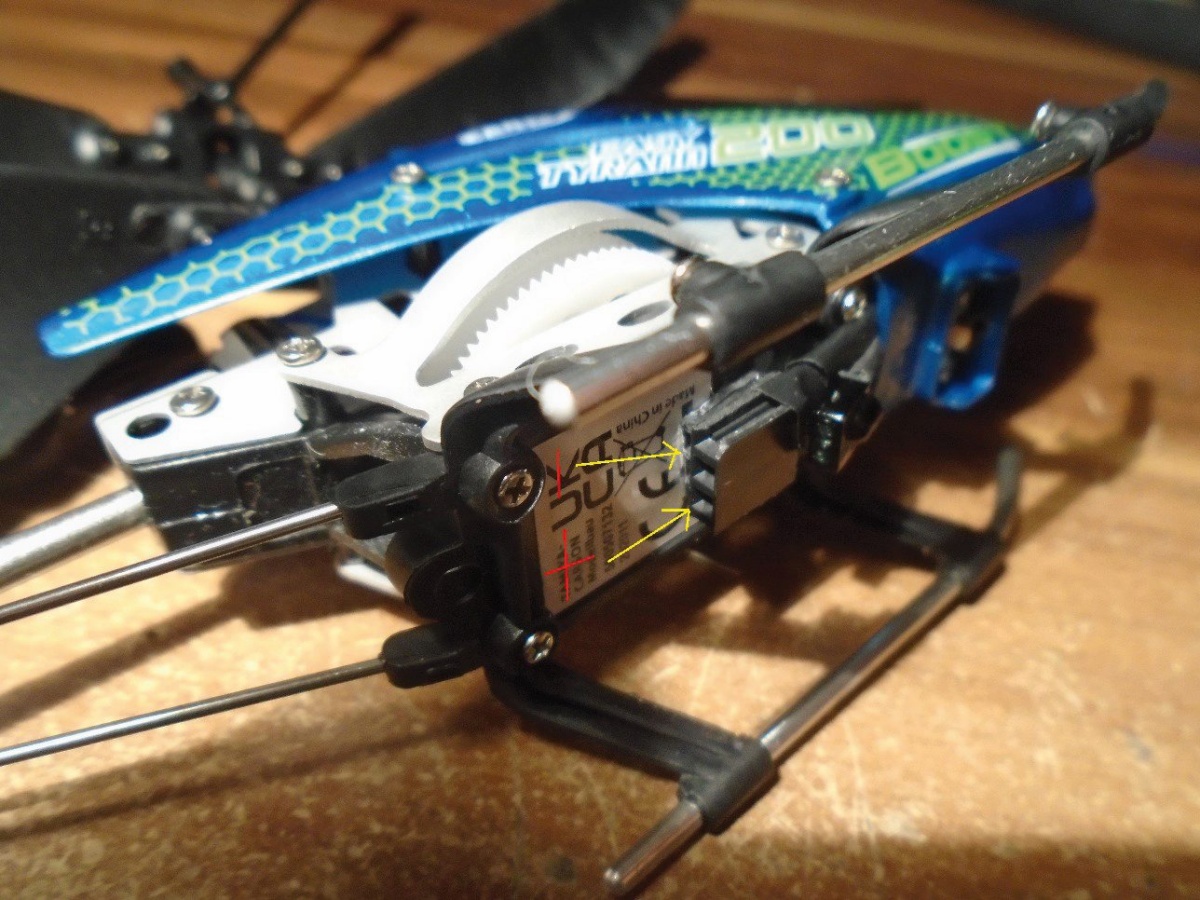
S spodnje strani drona prilepljena vtičnica tik za detektorjem infrardeče svetloba, prek katere upravljamo dron.
Predelava modula ESP32-CAM
ESP32-CAM ima vgrajen napetostni regulator AMS1117, ki napetost zmanjša z okoli 5 V na 3,3, vendar ta pri vhodnih napetostih, manjših od 4 V, ne zmore zagotoviti napajalne napetosti 3,3 V za normalno delovanje modula. Rešitev je vgradnja dveh miniaturnih napetostnih regulatorjev LM6206L3 z nizkima padcema napetosti, s katerima na ESP32-CAM premostimo priključka z oznakama 5 V in 3,3 V: priključka regulatorjev Vin vežemo na priključek 5 V, priključka Vout na priključek 3,3 V, priključka GND pa na GND (maso). S tem je napajalna napetost modula ESP32-CAM vselej 3,3 V, razen če ima baterija manj od 3,3 V.
Zakaj dva LM6206L3? Vsak ima elektronsko omejitev toka 250 mA, medtem ko modul ESP32-CAM potrebuje okoli 500 mA toka za normalno delovanje s polno funkcionalnostjo. Deluje tudi z enim LM6206L3, vendar brez funkcionalnosti Wi-Fi, lahko pa video posnamemo na kartico SD.
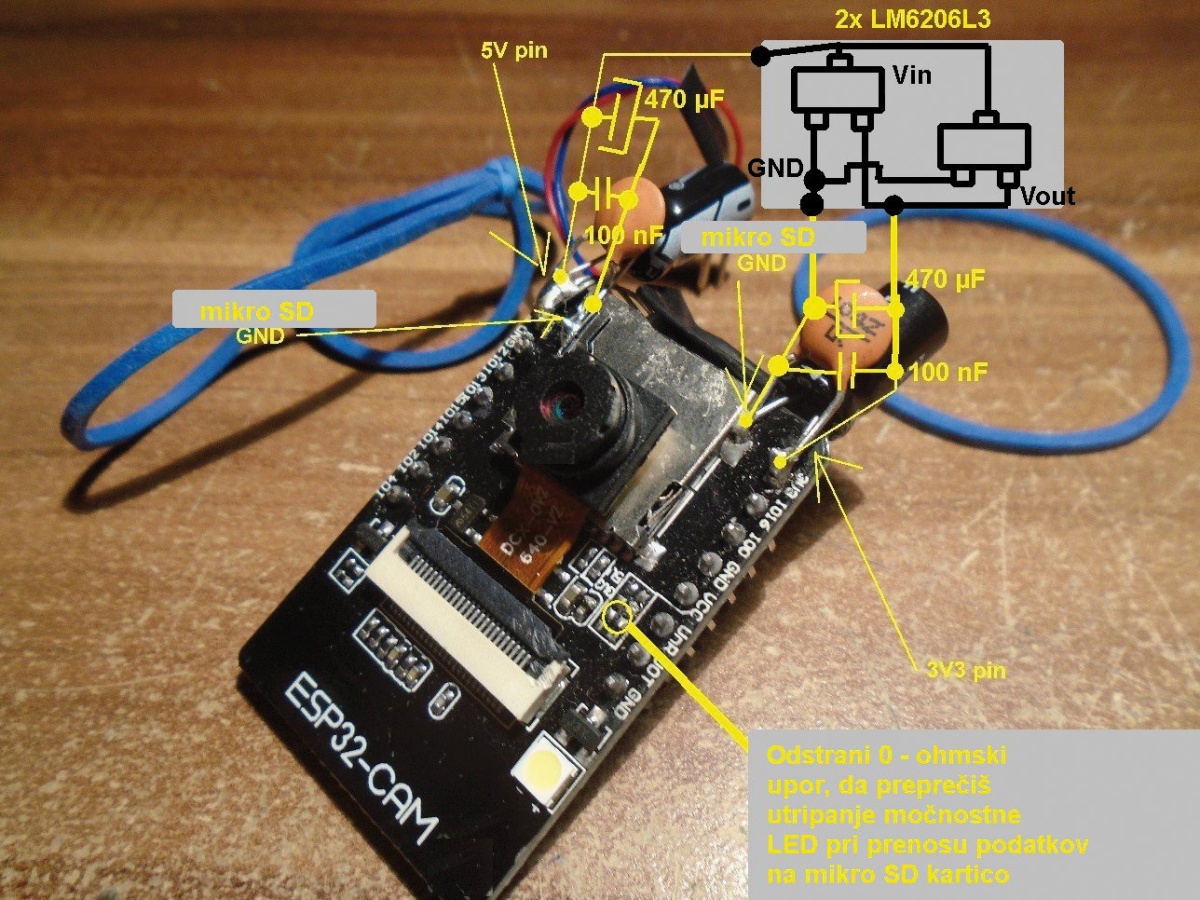
Predelava modula ESP32-CAM je sorazmerno enostavna, največ dela imamo s spajkanjem miniaturnih LM6206L3.
Naslednji korak je stabilizacija napajalne napetosti, saj motorji helikopterja povzročajo precejšnja nihanja napetosti. Med priključka 5 V in GND (masa) vežemo kondenzatorja 470 µF/6 V in 100 nF, prav tako pa tudi na drugi strani med priključka 3,3 V in GND vežemo enaka kondenzatorja (glej sliko). Dobro je, če so kondenzatorju čim manjši.
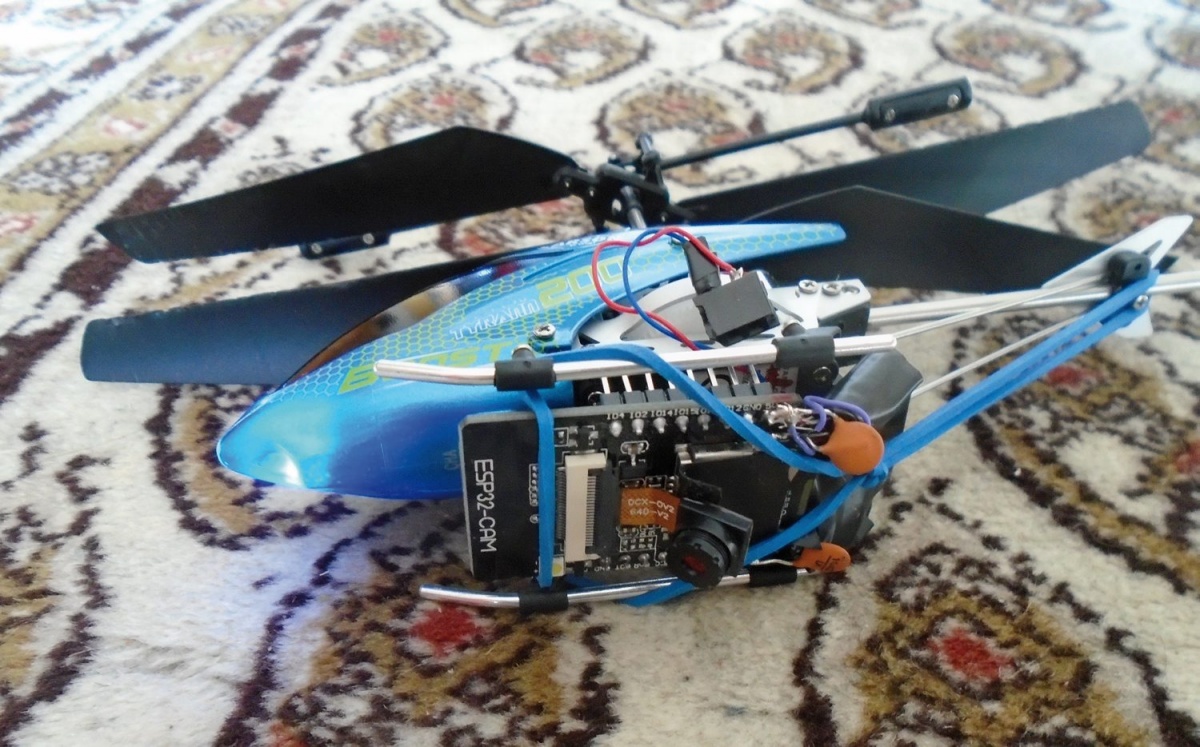
Za napajanje kamere med poletom moramo izdelati le še povezovalni kabel, ki ga z ene strani vtaknemo v vtičnico helikopterja, z druge pa nataknemo na priključka 5 V in GND modula ESP32-CAM. Kamera začne delovati takoj po priklopu napajanja, zato je dobro prej s stikalom vklopiti krmilnik helikopterja in nato pritrditi kamero z elastiko (dovolj sta dve elastiki, ki ju zapnem eno v drugo), šele nato pa vtakniti kabel kamere. Sledita vklop daljinskega upravljalnika in letenje. Izklop delovanja pri ugasnjenem daljinskem upravljalniku in ustavljenih rotorjih izvedemo v obratnem vrstnem redu.
Prenos vgrajene programske opreme
Moduli ESP32-CAM imajo navadno že nameščeno vgrajeno programsko opremo za prenos žive slike prek Wi-Fija. Namesto te lahko na spletu poiščemo tudi tako, s katero video posnamemo na kartico microSD. Za nameščanje nove programske opreme potrebujemo most med USB in RS232 z nivoji TTL ter napajalni kabel z vtičnico USB, razen če med programiranjem modul napajamo kar iz helikopterske baterije. Poleg tega potrebujemo še mostiček (sam uporabljam takega u upornostjo 1 k Ohm), s katerim pred programiranjem povežemo kontakta GPIO0 in GND, tako da se modul ESP32-CAM zažene v načinu za programiranje. Izvorno kodo vgrajene programske opreme za prenos slike prek omrežja Wi-Fi najdete tudi v dodatku za okolje Arduino za programiranje modulov ESP32 med primeri programske kode File/Examples/ESP32 Development Module/ESP32/Camera/cameraWebServer. Podrobnosti so objavljene tudi na sites.google.com/site/pcusbprojects.
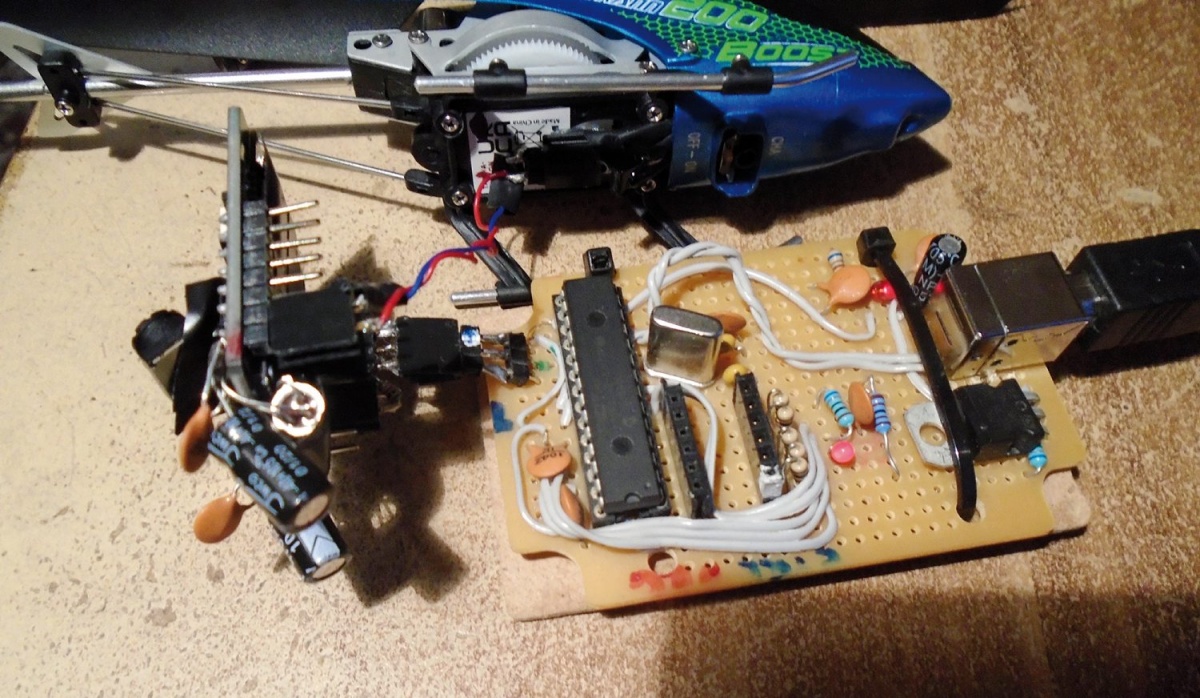
Prenos vgrajene programske kode iz razvojnega okolja Arduino v modul ESP32-CAM
Princip letenja in pravilna namestitev modula ESP32-CAM
Helikopter poganjajo dva glavna rotorja, ki se vrtita v nasprotnih smereh, ter repni rotor, ki z nagibanjem zadnjega dela helikopterja omogoča letenje naprej in nazaj. Vrtenje helikopterja okoli lastne osi omogoča vsota vrtilnih momentov glavnih rotorjev, ki je odvisna od njunih hitrosti vrtenj. Kadar se v nasprotnih smereh vrtita enako hitro (vsota je 0), helikopter vzdržuje smer, če pa se eden vrti počasneje, se z razmerju vrtilnih momentov obeh rotorjev sorazmerno s hitrostjo obrača v levo ali desno.
Pritrditev kamere s povezanima gospodinjskima elastikama
Repni rotor nagiba glavna rotorja v smer leta, pri čemer nagib naprej pomeni letenje naprej, nagib nazaj pa letenje nazaj. Temu se upira giroskopski stabilizator nad vrhnjim rotorjem, zato se helikopter hitro ustavi, ko repni rotor preneha delovati. Če se mehanski giroskopski stabilizator poškoduje, helikopter ne more leteti, saj je v zraku povsem nestabilen po navpični osi. Letenje brez mehanskega stabilizatorja bi bilo mogoče le s kompleksnejšim krmilnikom letenja z elektronskim giroskopom, kot ga poznajo večji droni pa tudi Nasin helikopter z dvema rotorjema, ki je kot prvi poletel na Marsu.
Ker je zmogljivost mehanskega giroskopa sorazmerno majhna, moramo pri dodatni obtežitvi helikopterja breme pritrditi čim bliže osi glavnih rotorjev oziroma pod težišče neobremenjenega helikopterja. Preveč obremenitve zadaj ali spredaj lahko premaga učinek giroskopske stabilizacije in povzroči letenje helikopterja naprej ali nazaj tudi, ko repni rotor ne deluje.
… do pritrditve kamere in letenja
Vzlet helikopterja s kamero pod sankami je za začetnika najlažji z ne premehke in ne pretrde blazine, v katero se kamera pogrezne, helikopter pa kot običajno stoji na sankah. Sam ga zdaj pogosto spuščam kar z roke, še več vaje pa zahtevajo prijem helikopterja za sanke, ko ta lebdi, in ugasnitev motorjev oziroma pristajanje na roki. Oboje ni v skladu z navodili za uporabo, ki opozarjajo na nevarnost poškodbe obraza, zato tega raje ne počnite.
Vzlet
Povsem spodobno pa se da vzleteti s kamero tudi s podstavka, izdelanega iz kock lego. Ta je izdelan tako, da je zadek helikopterja nekoliko privzdignjen, zato pri izključenem zadnjem rotorju in potegu ročice za dvig vzleti naprej in se v zraku počasi zaustavi in lebdi oziroma se premika s tokom zraka. Pri pristanku s kameri moramo tik nad tlemi ugasniti vse motorje, pri čemer se helikopter zaradi kamere prevrne na bok.
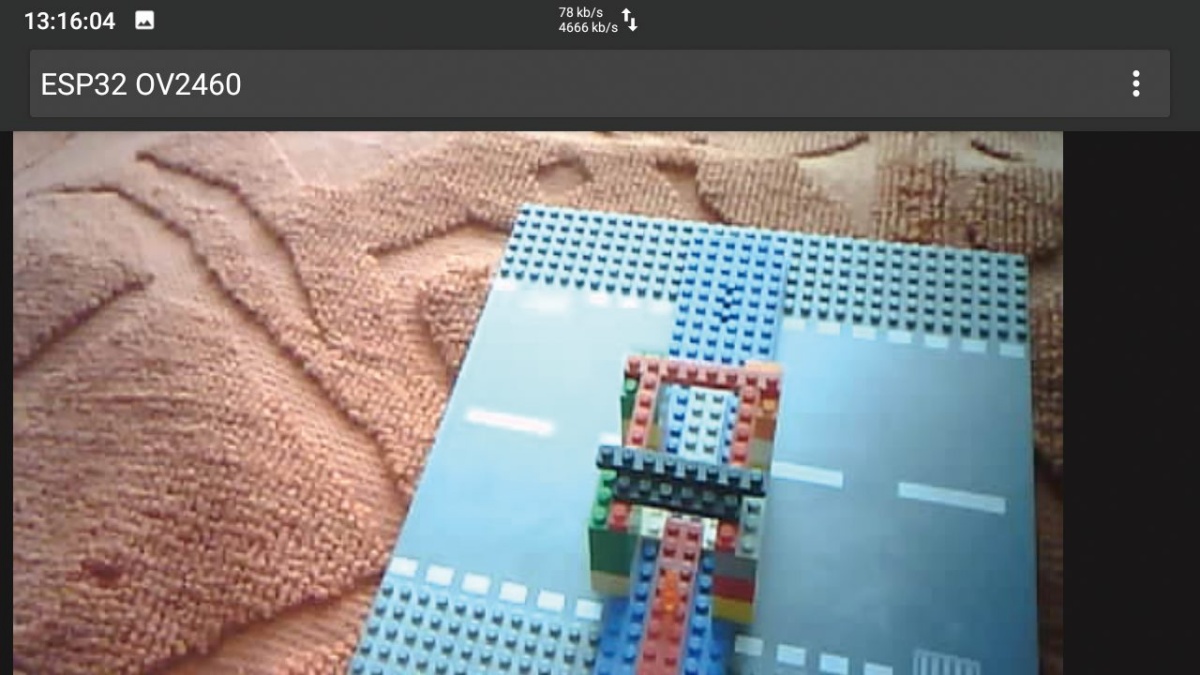
Prenos žive slike na pametnem telefonu – pogled na vzletišče iz kock lego iz ptičje perspektive
Nestabilnosti pred vzletom in med njim se lahko delno izognemo, če uporabimo kamero z daljšim priključkom s konektorjem SCCM, ki jo pritrdimo z zadnje strani, medtem ko ploščico tiskanega vezja ESP32-CAM pritrdimo pod sani helikopterja, a se za pogled naprej vseeno izplača potruditi.
Za konec še to! Če želite z dronom s kamero leteti na prostem, se prej v članeku Dron, pametni računalnik v zraku iz septembrskega Monitorja prepričajte, ali to smete storite.
Na kaj moramo paziti?
Predelave modela helikopterja in njegovega opremljanja s kamero ter letenja s kamero se lotevate izključno na lastno odgovornost. Z lepljenjem napajalne vtičnice na ohišje helikopterja skoraj gotovo izgubite jamstvo, obenem se trajnost vgrajene baterije pri večji obremenitvi lahko zmanjša. Sam sem se za poseg odločil kljub tveganju, saj nov helikopterski dron ne stane veliko, pa tudi zato, ker jamstvo ne velja za poškodbe, ki nastanejo zaradi napak pri pilotiranju in običajne obrabe delov.