Potovati na avtopilotu
V začetku marca je podjetje Uber kot prvo uporabilo avtonomne tovornjake za komercialni prevoz tovora. Njihovo hčerinsko podjetje Otto jih je opremilo z naprednimi sistemi, ki so zmogli sami voziti po arizonski avtocesti, čeprav jih je po naselju še vedno upravljal voznik. Kljub temu bo treba na njihovo široko rabo še čakati.
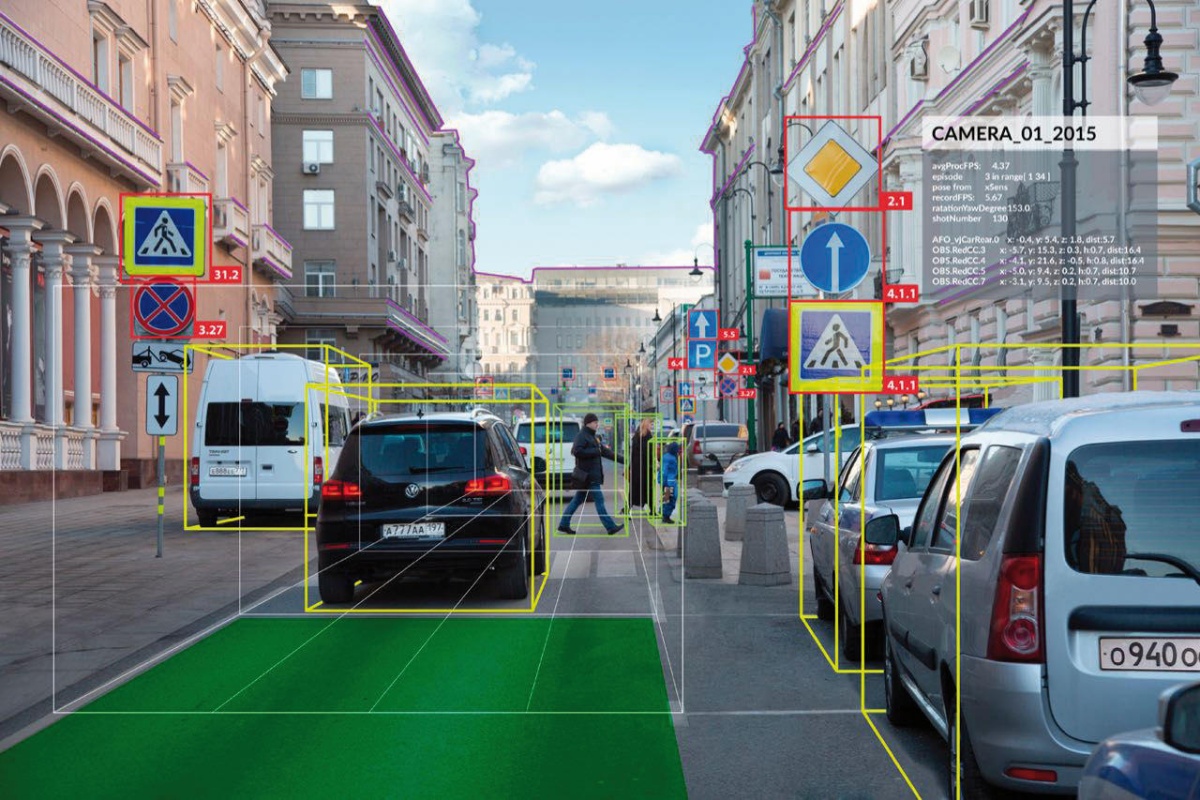
Računalniško videnje je rezultat različnih visokoločljivostnih kamer, laserskih tipal, radarja in drugih senzorjev, ki jih v realnem času obdelajo napredni algoritmi. Ob pomoči te zaznave se lahko vozilo giblje v prostoru in predvideva obnašanje drugih udeležencev v prometu. (vir: WelkerMedia)
Zamisel o avtomobilu, ki bi vozil sam, ni nova. Prvi taki eksperimenti so bili izvedeni že okoli leta 1920, v sedemdesetih pa so na Japonskem testirali avto, ki je znal slediti zanj prirejeni prometni signalizaciji in je dosegal hitrost do 30 km/h. Z razvojem računalniške tehnologije v osemdesetih in devetdesetih se je razmahnilo tudi testiranje novih prototipov, gruče zanesenjakov pa so jih v začetku tisočletja že testirale v nevadski puščavi. Prva avtonomna vozila je šest ameriških držav spustilo na ceste pred tremi leti, a velja poudariti, da so že nekaj let na voljo kot težka mehanizacija. Dokaj enostavno je namreč programirati stroj, ki se bo gibal znotraj zaključene zanke v izoliranem prostoru, kot je, denimo, dnevni kop. V takšnem okolju so že nekaj časa na voljo, denimo, tovornjaki za odvoz velikanskih količin peska in zemlje. A v tem primeru težko govorimo o avtonomnem upravljanju vozila, boljši izraz bi bil avtomatizacija vožnje. Izziv gibanja na odprti cesti je namreč veliko večji in kompleksnejši.
Kljub popularizaciji naziva 'avtomnomno vozilo' še danes ne moremo govoriti o resnični samostojnosti upravljanja. Vsa tako poimenovana prevozna sredstva še zahtevajo prisotnost človeka v kabini, skupaj s sistemi, ki vozniku omogočajo, da v trenutku prevzame nadzor. Zatorej gre za avtomatizacijo vožnje, kjer napredni sistemi pri upravljanju človeku pomagajo in mu omogočajo manjšo osredotočenost na vožnjo, namesto da bi ga v celoti nadomestili. Na trg naj bi kmalu prišli avtomobili tretje stopnje avtomatizacije (glej okvir), četrta pa je v razvoju. Celo na uglednih ustanovah, kot je Massachusetts Institute of Technology (MIT), ocenjujejo, da so prva povsem avtonomna vozila oddaljena še vsaj desetletje. Med osebnimi vozili po tehnološki plati trenutno vodi novi Audi A8, ki so ga lansirali novembra lani, a naj bi tudi njegove sposobnosti samovoznosti pri hitrostih do 60 km/h aktivirali šele prihodnje leto. Na podobni stopnji je Volvo, ki z modelom S60 celo že izvaja prve poskuse za četrto stopnjo avtomatizacije. Napredno tehnologijo uporablja za vozila serije S tudi Mercedes, onstran luže pa Tesla. Kar zadeva sisteme upravljanja, se v razvoju merita predvsem Googlov Waymo in Uberjev Otto, ki sta nedavno sklenila tudi nekaj sto milijonov težko pravno poravnavo (glej okvir), a ima železo v ognju danes večina velikih avtomobilskih in informacijskih podjetij.
Tovornjaki z laserskimi očmi
Za vsa vozila je program za avtonomno upravljanje zasnovan zelo podobno. V osnovi ga sestavlja pet prvin: računalniško videnje, senzorna fuzija, lokalizacija, načrtovanje poti in nadzor. Prvi dve računalniku omogočata natančno lokalizacijo, s katero lahko načrtuje pot in jo na koncu prek nadzora nad vozilom tudi uresniči. Na prvi pogled enostavno, toda hakeljc je v detajlih. Položaj vozila mora biti določen bistveno natančneje kot, denimo, pri telefonu, saj na cesti šteje vsak centimeter. Zato je nujno s senzorji pridobiti čim več podatkov in jih nato v realnem času tudi natančno obdelati. Ko računalnik dobi podatke o okolici in o gibanju avta v njej, lahko začne načrtovati pot, s predvidenimi reakcijami in potmi drugih udeležencev v prometu. Zarisati si mora načrt, kako varno manevrirati mimo vseh teh ovir. Zadnji člen verige je tehnološko še najmanj zahteven, saj mora računalnik le skrbeti za udobno krmiljenje in pospeševanje na poti.

Uberjevi tovornjaki, opremljeni z Ottovim sistemom za avtonomno vožnjo, so marca začeli po avtocestah v Arizoni prevažati redne pošiljke tovora. (vir: Wired)
Posebej zahtevno je avtonomno upravljanje tovornjakov. Njihova raba se zdi sprva še mikavnejša kot pri osebnih avtomobilih, saj bi lahko, na primer, vozili v konvoju, kjer bi drug drugemu ponudili zavetrje in tako prihranili gorivo. Takšna vožnja bi lahko omogočala tudi hibridno fazo, kjer bi čelni tovornjak vozil človek, drugi pa bi mu natančno sledili. Šoferji bi lahko počivali kar med vožnjo in tako pot opravili hitreje. Vendar je večja masa kamijona in z njo povezana okornost ter dolga zaviralna pot za inženirje velik izziv. Upravljavski sistemi kamijona morajo biti namreč nadvse zmogljivi, saj je zaradi velikosti in inercije vozila prostora za napako še manj. Zaradi tega morajo Uberjevi vozniki kljub uspešni avtomatizirani dostavi tovora še vedno imeti roke ves čas na volanu. Pritožujejo se, da je takšno potovanje zanje še zahtevnejše, čeprav priznavajo, da sistem pogosto vozi bolje od njih samih.
Da bi se tovornjak lahko meril z izkušnjami poklicnih šoferjev, se mora tak šofer zanesti na kopico sistemov – od radarja, sonarja, kamere in laserskega tipala lidar prek senzorjev za merjenje oddaljenosti od roba cestišča in drugih vozil do naprav GPS in stalne wi-fi komunikacije s centrom in drugimi vozili. Za avtonomno navigacijo je stalna povezava z internetnim oblakom nujna in samoumevna, saj tam najde natančne zemljevide okolice zunaj mest, obenem pa prejema podatke o soudeležencih v prometu. A vsaj za Ottov sistem je ključnega pomena ravno lidar, svetlobni radar, ki s pulznim laserjem ustvarja natančno topografsko sliko okolice. Ta inštrument je silno uporaben pri sleherni tehnologiji, ki potrebuje natančno sliko neke površine, ne glede na to, ali gre za tla, gozdove ali oblake. Uporabljajo ga vojaški droni, napredne meteorološke postaje, geodeti, oceanografi in mnogi drugi. Toda tehnologija 3D skeniranja, kot jo včasih imenujejo, ni poceni, saj lahko že ena naprava stane okoli 100.000 dolarjev. Otto se je tudi zaradi tega namenil za rabo v lastnih sistemih izdelati inačico, ki naj bi bila kar desetkrat cenejša. V doglednem času obljubljajo paket, ki bo vsak novejši kamijon preuredil v vozilo z avtomatizacijo tretje ali celo četrte generacije za razmeroma nizko ceno 30.000 zelencev.
Globoko učenje in zadostni približki
Ves nabor senzorne zaznave obdeluje napredni algoritem SLAM, ki ustvarja dobre približke položaja premikajočega se vozila glede na računalniško generiran zemljevid okolice. Ta kos programske opreme so razvili za robote, saj rešuje problem lokalizacije. Računalnik se znajde v nerešljivi situaciji, ko mora natančno določiti položaj nekega objekta v gibanju in obenem izračunavati zemljevid okolice. Ker se ta objekt – recimo avto – stalno premika, se program znajde v paradoksu. A ga SLAM reši ob pomoči matematičnih konstruktov, kot je razširjeni Kalmanov filter, ki izračunava uporaben, precej natančen približek. Ta algoritem je zatorej ključnega pomena tako za samovozne avtomobile kot za številne druge stroje, ki potrebujejo avtonomno delovanje – od domačih robotov do raziskovalnih roverjev na Marsu. Pri avtih in tovornjakih deluje skupaj z lidarjem in kamerami, ki algoritmu dajo zadostne informacije za gibanje v prostoru.
Stopnje avtonomnosti vozila
Mednarodna zveza za standardizacijo v avtomobilizmu (SAE) je leta 2016 predstavila šeststopenjsko lestvico za ocenjevanje avtonomnosti vozila, ki je prešla v splošno rabo.
Stopnja 0: Brez avtomatizacije. Človek upravlja vse vidike vožnje, četudi ima na voljo opozorilne ali pomožne sisteme.
Stopnja 1: Pomoč pri vožnji. Človek upravlja vozilo, sistem pa mu pod določenimi pogoji pomaga bodisi pri pospeševanju in zaviranju bodisi pri krmiljenju. Primer je, recimo, način 'cruise control'.
Stopnja 2: Delna avtomatizacija. Pri določenih načinih vožnje (recimo parkiranju) vozilo prevzame nadzor tako nad upravljanjem kot pospeševanjem ali zaviranjem. Toda človek mora običajno imeti ves čas roke na volanu, da sistem ve, da je pripravljen prevzeti nadzor.
Stopnja 3: Pogojna avtomatizacija. Od vključno te stopnje naprej avtomatizirani sistem upravljanja stalno nadzira dogajanje v okolici, zato ga človeku ni treba. Vozilo bo prevzelo nadzor nad vsemi vidiki vožnje s pričakovanjem, da se bo človek odzval na specifično in nepričakovano dogajanje na cesti. Čeprav se mora človek še vedno v določenem času odzvati na dogajanje, mu ni več treba biti stalno pozoren na okolico in lahko za volanom, denimo, bere ali gleda film.
Stopnja 4: Visoka avtomatizacija. Vozilo se upravlja samo, četudi se človek ne odzove na poziv k intervenciji. Tudi če vozilo potrebuje človeško pomoč, se mora znati varno ustaviti, dokler nadzora ne prevzame voznik.
Stopnja 5: Polna avtomatizacija. Vozilo se upravlja samo, ne glede na pogoje na cesti ali v okolici.
Za boljše odzive na življenjske situacije sistem uporablja tako globoko učenje kot nevronske mreže. Atonomna vozila imajo v spominu shranjene desetine tisočev različnih avtomobilov, signalizacijo iz različnih kotov, vsakovrstne prometne situacije, ki jih ves čas dopolnjujejo z novimi, pridobljenimi iz internetnega oblaka. S to obširno zbirko podatkov lahko računalnik med vožnjo ugotovi, s čim ima opraviti in kako naj se na nastalo situacijo odzove. Podobne tehnike razvijalci uporabljajo tudi za krmiljenje, saj zbirka zajema številne podatke o človeški vožnji v različnih razmerah. S temi podatki se računalniški upravnik vozila uči samostojne vožnje, s čedalje večjim naborom različnih okoliščin pa se njegova veščina izpopolnjuje. Zato ima vsak tovornjak že danes – na tretji stopnji avtomatizacije – na krovu majhen superračunalnik. Ottov vodja programa Eric Berdinis se priduša, da se lahko njihov sistem na tovornjakih po natančnosti kosa z vojaški sistemi za vodenje izstrelkov.
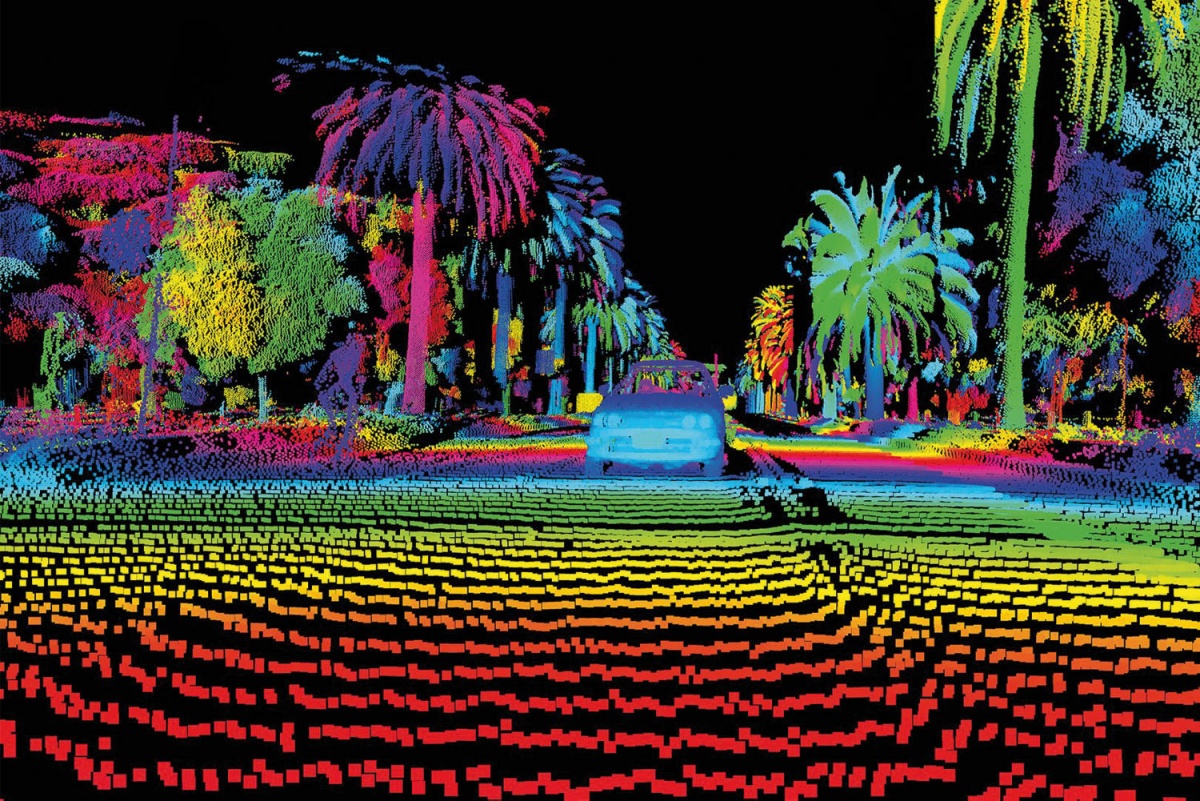
Cesta, kot jo ob pomoči lidarja vidi avtonomno vozilo. Ta senzorni pripomoček je postal ključni kos opreme za računalniško navigacijo. (vir: Wired UK)
Samovoznik ni nikoli pijan
Poglavitna prednost avtonomnih vozil je precej večja varnost na cesti. Že avtomobili prve in druge generacije so s svojo pomočjo vozniku preprečili nič koliko nesreč, kar naj bi prihodnje generacije vozil še izboljšale. Splošna ocena strokovnjakov je, da so avtonomna vozila vsaj 40 odstotkov varnejša od tistih, s katerimi upravlja človek. Ameriška študija iz leta 2010 celo kaže, da bi se lahko izognili 80 odstotkom trčenj, ko bodo vozila v stalni medsebojni komunikaciji. Nedavno so bili ljudje v Dubaju, kjer so poskusno uvedli avtonomna vozila, z njimi zadovoljni kar v 91 odstotkih. To pravzaprav ne bi smelo presenečati, saj samovozniki ne pijejo, na cesti niso objestni, nikoli ne zaspijo za volanom ali so zamišljeni. Nekatere evropske države, denimo Finska, so si zadale cilj, da na njihovih cestah že čez nekaj let ne bo več smrtnih žrtev, ključni dejavnik tega pa naj bi bila ravno avtonomna vozila. Eno prvih podjetij, ki je uspešno uvedlo veliko samostojnih varnostnih sistemov v svoje avtomobile, je Mercedes. Ta je že leta 2013 pozvali prvaka formule 1, Michaela Schumacherja, naj poskuša karambolirati vozilo z vključenimi varnostnimi sistemi. V normalnih razmerah vožnje mu ni uspelo.
Poravnava Waymo-Uber
V začetku februarja sta dva velikana razvoja avtonomnih vozil sklenila presenetljivo poravnavo. Mesece se je govorilo, da bo Waymo (v lasti podjetja Alphabet, ki je krovno Googlovo podjetje) od Uberja zahteval vsaj milijardo dolarjev, ker naj bi jim slednji z lovom na njihove inženirje in z nakupom podjetja Otto ukradel tehnološke skrivnosti. A obe stranki sta se pogodili za približno štirikrat manjši znesek, izplačan ne v gotovini, marveč z deležem podjetja v višini 0,34 odstotka. Dovolj, da bo Waymo še bolj zanimala prihodnost Uberja. Predstavniki obeh podjetij so bili po poravnavi zadovoljni in prijateljski, saj se je Uber zavezal, da ne bo uporabljal Waymovih tehnoloških skrivnosti. Obe stranki se nadejata zdrave tekmovalnosti in inovativnosti, Uberjev šef Dara Khosrowshahi pa se je za zdraho opravičil. Poročevalci so komentirali, da sta bili podjetji videti kot zakonski par, ki se pred ločitvijo pobota. Google je namreč že od začetka investiral v Uber, pridobljeni lastniški delež in Uberjeve zaveze pa so ju znova zbližali.
Skoraj vsa podjetja, ki se ukvarjajo z izdelavo avtonomnih sistemov, poročajo o izjemnih rezultatih. Googlovi avtomobili, opremljenimi z njihovimi (oziroma Waymovimi) sistemi za avtonomno vožnjo, so na primer doslej prevozili že več kot dva milijona in pol kilometrov, v tem času pa imeli le dvanajst nesreč. Za le eno od njih je bil kriv njihov avtonomni sistem. Waymov avtomobil se je v začetku leta 2016 namreč zaletel v mimovozeči avtobus, ko se je hotel izogniti vrečam s peskom na voznem pasu. Čeprav ni bil nihče poškodovan, Google priznava krivdo, dogodek pa jemlje za učno izkušnjo. Trenutna ocena vrednosti njihovega tehnološkega paketa je okoli 150.000 dolarjev, samo lidar pa velja skoraj polovico te vsote. Waymo je nedavno sicer sklenil partnerstvo z Intelom, da bi skupaj povečali procesorsko moč njihovih avtonomnih vozil. Podobno partnerstvo je sklenila Toyota, nedavno pa je na sejmu uporabne tehnologije CES Nvidia razkrila čip Xavier, ki naj bi imel zmožnost umetne inteligence. Za njegovo rabo v avtonomnih vozilih so se povezali z Volkswagnom.
Četudi so se avtonomno upravljani avtomobili zaenkrat izkazali za zelo varne, je Teslin Avtopilot zakrivil prvo smrtno žrtev, saj senzorji niso zaznali bele prikolice priklopnika, v katero je vozilo trčilo z vso silo. Resnici na ljubo je bil bolj ali manj kriv človek v vozilu, ki nad njim ni prevzel nadzora, čeprav ga je avto kar sedemkrat pozval k temu. Morda ga je zavedlo ime – kljub nazivu Avtopilot je bil tedanji Teslin avtomobil še daleč od samovožnje. Prva vozila tretje stopnje avtomatizacije bodo prišla ne trg šele pozno letos. Prva žrtev avtonomnega avtomobila se je tako zares zgodila šele sredi marca, ko je Uberjev samovozec v Arizoni povozil peško, ki cestišča ni prečkala na označenem mestu. Kritiki trdijo, da je ravno to največji problem avtonomne navigacije. Sistem namreč ne more enako kot človek ločiti med, denimo, poljem koruze, v katero bi bilo varno zapeljati, in gručo otrok. Domnevno bo to odpravilo globoko učenje, a argument v tem trenutku bolj ali manj drži.
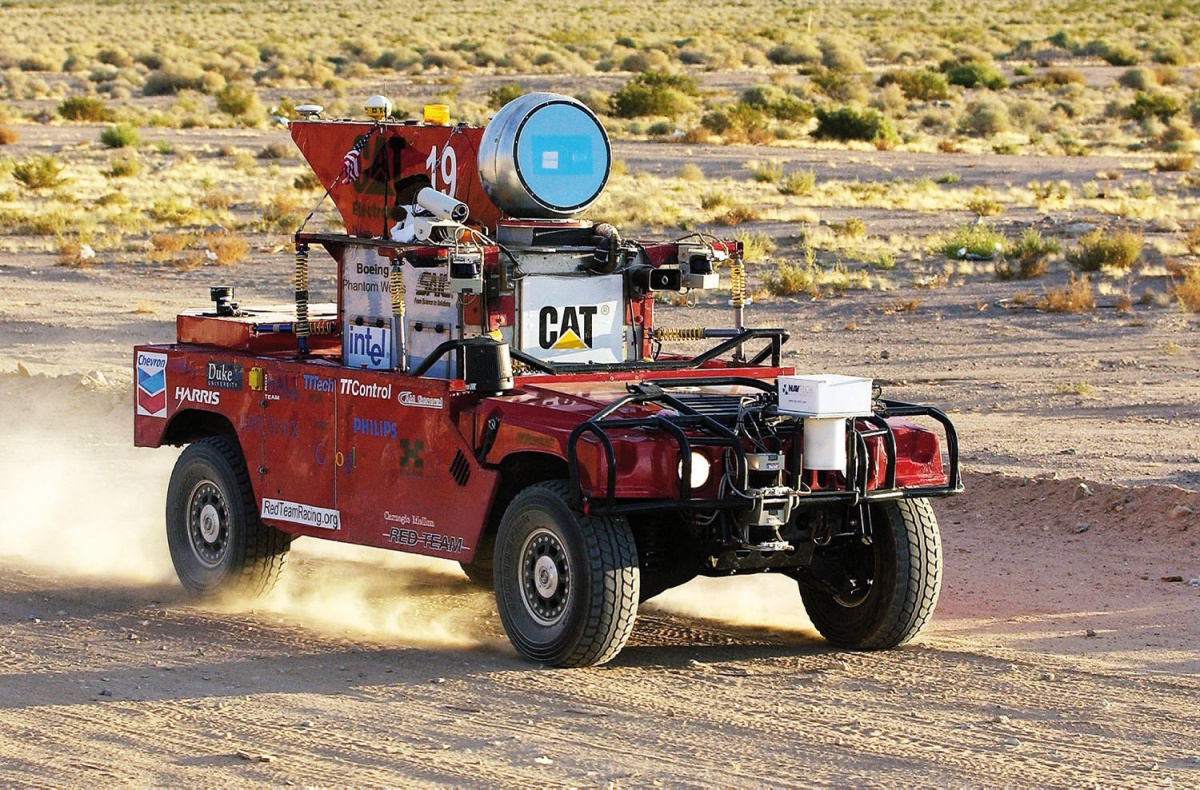
Tekme samovozečih terencev po puščavi Mojave so bile od leta 2004 glavno zbirališče zanesenjakov za avtonomno vožnjo. Prireditev, ki jo je organizirala ameriška obrambna agencija DARPA, je bila prizorišče številnih uspehov, pa tudi polomov. (vir: Wired)
Sodobne tehnologije v analognem svetu
Stroški in tehnologija pri vpeljavi avtonomnih vozil v promet so ovire, ki se bodo z leti krepko zmanjšale. Drugače pa je z družbenimi posledicami široke rabe samovoznikov. Samo v ZDA je z avtoprevozništvom povezanih okoli 1.700.000 delovnih mest, ki jih bo nova tehnologija ogrozila ali uničila. Četudi bodo tovornjaki še kar nekaj časa potrebovali šoferja, bo skoraj zagotovo prišlo do velikega znižanja njihovih plač. Njihovi delodajalci bodo gotovo ugotovili, da bodo zaradi novih tehnologij vozniki delali manj in imeli manj odgovornosti. Tovornjakarstvo je ena zadnjih dobro plačanih služb za nižje izobražene in le jalova tolažba je, da bodo čas v kabini zdaj lahko namenili tudi za učenje novega poklica, kot predlagajo razvijalci.
Po zadnjih raziskavah je sicer večina Evropejcev naklonjenih tehnologiji avtonomnega upravljanja z vozili. Menijo, da so takšna vozila varnejša od tistih, ki jih vodi človek. Kljub temu bi jih želela imeti le petina, saj ljudje neradi prepustimo nadzor stroju. Zaznati je veliko nezaupanje v varnost računalniških sistemov, saj se ljudje bojijo hekerjev, ki bi jim ukradli ali okužili vozilo. Odprto je tudi vprašanje zasebnosti, saj se morajo samovozni avtomobili med seboj pogovarjati, to pa za marsikoga pomeni dodatno stopnjo vladnega in korporativnega nadzora nad njihovimi življenji. Okoljsko gledano bo imela ta tehnologija verjetno mešan učinek. Na eni strani bo zaradi večje stopnje koordiniranosti avto lažje deliti s soljudmi, potrebnih pa bo tudi manj parkirnih mest, saj se bodo vozila sama vračala domov. Je pa tudi resna možnost, da bi njihova široka raba povečala obseg mest in njihov vdor v naravo, saj zaradi udobne vožnje ljudje ne bi hoteli več živeti v strnjenih naseljih. Oviro predstavljajo tudi etični izzivi rabe avtonomnih vozil. Kako se bo odločil računalnik, če bo imel na voljo le tri grozne možnosti, recimo povzročiti smrt voznika, povoziti otroka na kolesu ali zapeljati v gručo treh naključnih pešcev? Razprava se giblje med dvema taboroma, dentološkim in utilitarističnim. Prvi zagovarja skupino absolutnih pravil, ki se jih mora avtomobil držati, drugi pa, da mora vozilo vedno delovati s smotrom največje učinkovitosti, ki jo je treba opredeliti, denimo čim manj smrtnih žrtev. Verjetno bodo v algoritme resnično avtonomnih naprav uvrščene prvine obeh.
Prihodnosti naproti
Z večanjem procesorske moči, senzorne zmogljivosti in tehnologije globokega učenja postajajo avtonomna vozila čedalje bolj varna in uporabna. A od popolne avtonomnosti vozil nas po tehnološki plati kljub vsemu loči še desetletje ali dve. Ali smo na prihodnost pripravljeni družbeno, okoljsko, ekonomsko in moralno, je drugo vprašanje. Nova tehnologija odpira venomer nova vprašanja, postavlja nove izzive. Verjetno bodo tudi ta vozila poglobila prepad med revnimi in bogatimi, med razvitimi državami in tistimi, ki capljajo zadaj. Za rabo avtonomnih vozil še ni ne pravnih ne moralnih precedensov, tudi okoljski vpliv te tehnologije je še vedno neznanka.

Googlova majhna, oblata reč je prvo vozilo, ki deluje brez krmila in pedal. Človek v njem je le nadzornik in morebitna zavora v sili. (vir: The Verge)
Kljub temu je jasno, da se bo danes draga tehnologija avtonomne navigacije z leti pocenila, njene dobrobiti pa lahko vložek odtehtajo. To se kaže v čedalje večji komercialni rabi takih vozil. Z leti tako zagotovo ne bo več vprašanje, ali bo avtomobil imel avtonomne sisteme, marveč katere. Širša vpeljava avtonomnih vozil v cestni promet bo zmanjšala enega od vodilnih razlogov za smrtnost na razvitem globalnem Zahodu, namreč prometne nesreče. Tu so ovire za njihovo rabo predvsem v glavi uporabnikov, ki tehnologiji ne zaupajo. Na druge učinke, ki jih danes še ne moremo predvideti, pa bomo morali enostavno počakati. Najsi bodo dobri ali slabi.
Zgodovina samovoznih avtomobilov
1925 – Skozi New York se popelje avto brez voznika, ki ga je radijsko upravljal zadaj vozeči nadzornik.
1939 – Na Svetovnem sejmu je ameriški umetnik Norman Bel Geddes v razstavi Futurama upodobil radijsko vodene avtomobile, ki jih napajajo magnetni releji v cestišču.
1957 – V Lincolnu v ameriški zvezni državi Nebraska prvič uspešno vodijo model resničnega avtomobila s smerniki, zakopanimi v robnik ceste. Kasneje je poskus uspešno ponovljen.
1960–1979 – Številni poskusi z avtomobili, ki bi sledili magnetnim trakovom ali električnim kablom v cestišču. V Veliki Britaniji je, denimo, Citroënova žaba prepeljala vse vozišče pri hitrosti 80 km/h brez odstopanj in napak. Izračunali so, da bi vpeljava te magnetne tehnologije na britanske avtoceste podvojila njihovo zmogljivost in skoraj prepolovila število nesreč. Kljub obetavnim rezultatom so sredi sedemdesetih financiranje tega projekta opustili.
1969 – John McCarthy, eden od očetov umetne inteligence, je v eseju Računalniško vodeni avtomobili opisal sistem 'robotskega šoferja', ki močno spominja na sodobna avtonomna vozila. Vidne signale bi sprejemal prek kamere, potnik pa bi mu ukazoval s tipkovnico.
1983 – Mercedes Benz na Bundeswehrovi univerzi testira robotsko vozilo, ki navigira ob pomoči kamere.
1995 – Raziskovalec Dean Pomerleau z raziskovalnim kolegom prepotuje ZDA v vozilu, ki ga krmili ob pomoči nevronske mreže. Na približno 4000 kilometrov dolgi poti uravnava hitrost in zavira še vedno voznik.
2003 – Toyotin Prius kot prvo vozilo uporablja funkcijo za avtomatsko bočno parkiranje.
2004 – V puščavi Mojave se pomerijo avtonomna vozila, ki so se dve leti prej prijavila na razpis ameriške obrambne agencije DARPA. Cilj je prepotovati 200 kilometrov, nagrada je milijon dolarjev, tekmovalcev je petnajst. Najboljši med njimi prepotuje osem milj, preden avto zagori. Dogodek je bil resen udarec za tehnologijo samovoznikov.
2009 – Google se loti svojega skrivnega projekta razvoja avtonomnih vozil, današnjega Wayma.
2014 – Mercedes kot prvi vpelje avtonomne funkcije v svoje serijsko vozilo. Večina velikih avtomobilskih podjetij razvija svoje projekte.
2016 – Prva smrt v samovoznem avtu.
2017 – Audi napove prvo serijsko vozilo tretje stopnje avtomatizacije.






